

Estudio sobre mujeres en la ciencia en cinco centros de estudio superior analiza las barreras y dificultades que deben sortear las docentes e investigadoras de Ciencia e Ingeniería.
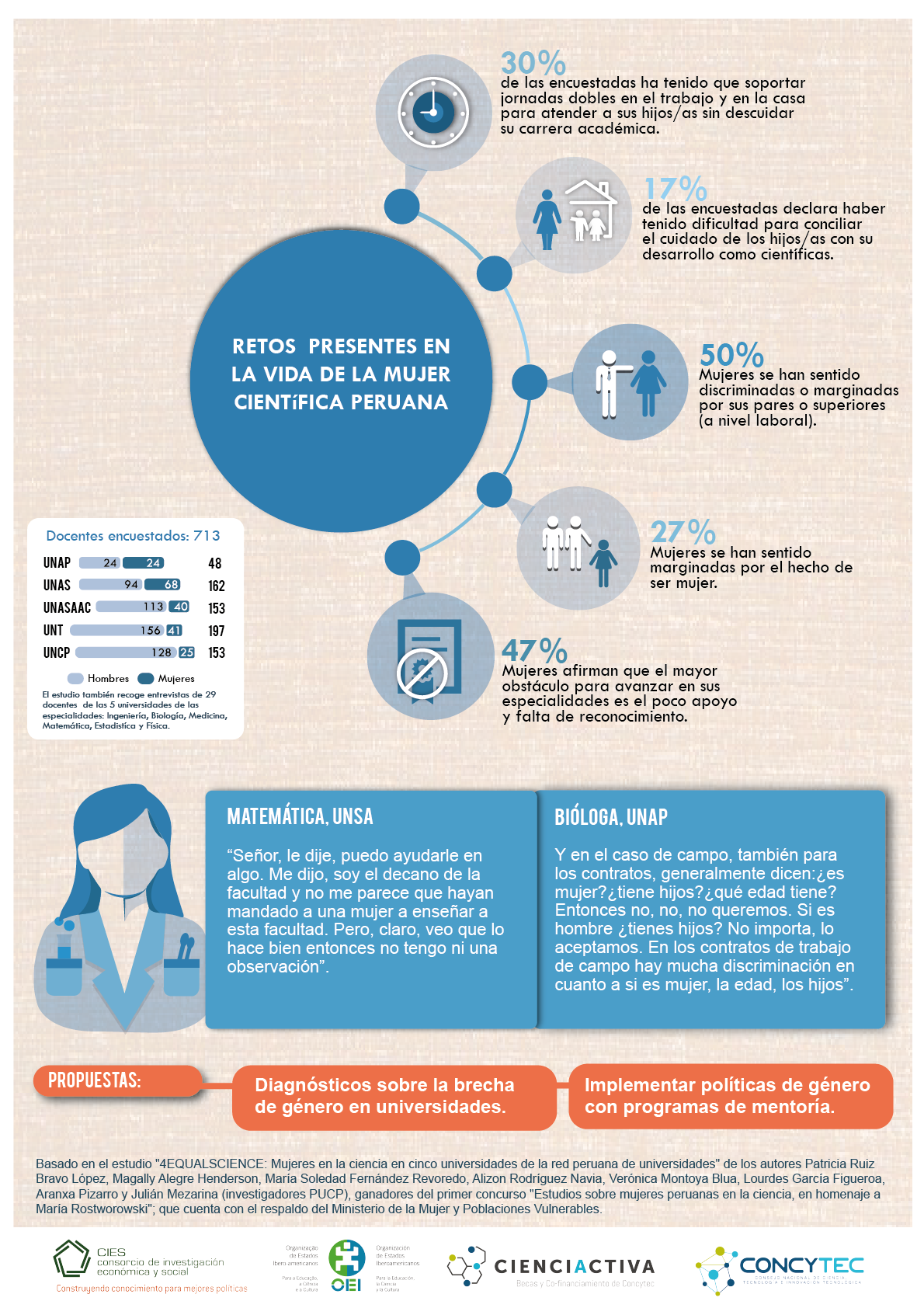
Una encuesta realizada a 713 docentes universitarias de 5 universidades del país (515 varones y 198 mujeres); 31 entrevistas a profundidad y 2 grupos focales a docentes mujeres, revela que ellas dedican muchas más horas a las tareas domésticas y de cuidado que sus pares varones como resultado de una inequidad en la asignación de las tareas domésticas. Aproximadamente el 60% de mujeres indicó que son las encargadas de las labores domésticas, mientras que solo el 20% de los varones indicó que esta responsabilidad es compartida entre ellos y sus parejas por igual. En lo que respecta al cuidado de la familia, el 42% de los hombres respondió que esta tarea recae habitualmente en su pareja, mientras que el 39% contestó que en ambos “por igual”.
Este sondeo se efectuó como parte del estudio ‘Mujeres en la ciencia en cinco universidades de la Red Peruana de Universidades peruanas (RPU)’, a cargo de Patricia Ruiz-Bravo, Magally Alegre, María Soledad Fernández, Alizon Rodríguez, Verónica Montoya, Lourdes García, Aranxa Pizarro y Julián Mezarina, investigadores PUCP. El objetivo principal fue contar con un diagnóstico sobre la trayectoria laboral de las mujeres científicas e ingenieras que permita el diseño de políticas públicas de igualdad de género en la ciencia y la tecnología.
El estudio analiza las barreras y dificultades que deben sortear las docentes e investigadoras de estas carreras en cinco universidades públicas: Universidad Nacional de Trujillo (La Libertad), Universidad Nacional de San Agustín (Arequipa), Universidad Nacional del Centro del Perú (Junín), Universidad Nacional de San Antonio Abad (Cusco) y Universidad Nacional de la Amazonía Peruana (Loreto).
Los autores precisan que si bien durante los últimos años se aprecian avances en la mejora de la condición y posición de las mujeres en las ciencias e ingeniería, aún prevalecen formas sutiles de discriminación que previenen su progreso y su presencia en el campo académico, así como en el campo de la docencia universitaria.
Las docentes mujeres en las carreras de ciencias e ingeniería bordean aproximadamente el 20% del total de docentes en las universidades públicas del Perú. Entre otros factores, su carrera atraviesa dificultades vinculadas a la discriminación sutil y explícita reflejada en un ambiente hostil de trabajo, a la carga familiar y a la autopercepción como mujer-madre que debe ocuparse de varias tareas.
Percepción sobre discriminación y marginación. Casi el 50% de las mujeres encuestadas se ha sentido discriminada o marginada por sus pares o superiores. 27% de las mujeres encuestadas se ha sentido marginada por el hecho de ser mujer.
Otras cifras del estudio como el cuidado de la familia, el 42% de los hombres respondió que esta tarea recae habitualmente en su pareja, mientras que el 39% contestó que en ambos “por igual”. Sin embargo, sobre la misma pregunta, ninguna docente mujer contestó que habitualmente su pareja se encarga de cuidar a los niños.
Frente a esto, lo que se halló es que existe una predisposición a “naturalizar las diferencias” por parte de las docentes, en tanto asumen estas tareas sin mucho cuestionamiento como parte de su rol como mujeres y madres, sin un reconocimiento explícito de la inequidad en la distribución del trabajo doméstico cuyo impacto en ellas que se expresa en la doble jornada y en la sobre exigencia. A ello se añade la necesidad de un mayor esmero de las docentes para demostrar que tienen las mismas capacidades que sus pares varones para formarse en los campos de ciencias e ingeniería en un ambiente que, como se ha mostrado, es altamente masculinizado.
Un tercio de las académicas señaló haber sido discriminada por su condición de mujer, mientras que solo un 3% de hombres declaró lo mismo. Estos tratos– de acuerdo con las encuestas –se manifiestan en procesos de promoción y ascenso, asignación de cursos o tareas, dificultad para ocupar posiciones de toma de decisiones, entre otros. De forma más sutil, se detectó el uso de microagresiones cotidianas orientadas a desvalorizar profesionalmente a las colegas, cuestionar sus capacidades académicas, limitarlas a labores más “operativas” en las investigaciones (como por ejemplo alejarlas del trabajo de campo y encargarlas de la redacción de los informes, no reconocerlas como pares académicos, etc.). La repetición cotidiana de estas microagresiones afecta la autoconfianza de las docentes, lo cual se acentúa por la falta de reconocimiento de sus pares masculinos.
Docencia y carrera académica. Más del 45% de las mujeres encuestadas dijo que el principal obstáculo para avanzar en sus carreras es el poco apoyo y reconocimiento. El 52% de hombres encuestados contestó de igual forma.
Como resultado, la encuesta revela que la universidad todavía no consigue establecer mecanismos más igualitarios de inserción para las científicas e ingenieras que, conscientes o no, tienen que bregar con situaciones de desigualdad.
En el caso de las entrevistas a profundidad, su propósito fue ahondar allí donde la encuesta no fue suficiente con el fin de formular nuevas preguntas de investigación. Los testimonios obtenidos en las entrevistas mostraron una naturalización de las diferencias que ha “normalizado” en las y los científicos las situaciones de desigualdad de manera tal que no se ha encontrado un cuestionamiento del orden vigente.
Finalmente, frente a una alta masculinización de las carreras de Ciencia e Ingeniería y la difícil inserción de las docentes mujeres en estas áreas, el equipo recomienda que la Superintendencia Nacional de Educación Superior Universitaria (Sunedu) incorpore en su modelo de licenciamiento universitario condiciones básicas de calidad asociadas a la equidad de género.
[Esta investigación fue elaborada con el apoyo del Consorcio de Investigación Económica y Social (CIES), la Organización de Estados Iberoamericanos (OEI), Cienciactiva del Concytec, y con el respaldo del Ministerio de la Mujer y Poblaciones Vulnerables (MIMP)]
Foto: Shutterstock
Fuente: cies.lamula.pe

Cómo Boston Dynamics nos hizo olvidar las torpezas robóticas hasta llevarnos a los saltos imposibles.
¿Ya vieron a Atlas dar saltos mortales? Por flexibilidad, agilidad y destreza, nos atrevemos a decir que es lo más impresionante que un robot humanoide o bípedo ha mostrado en la historia de la robótica. En tiempos en que caminar cómodamente sobre dos pies para los autómatas constituye de por sí una meta ambiciosa (y compleja a nivel de hardware, software e interacción entre ambas plataformas), Atlas vino a dejar la valla a un nivel, por ahora, inalcanzable.
Acaso Asimo y Cassie, dos robots bípedos (uno humanoide y el otro simplemente bípedo y sin cuerpo) eran los que más cerca estaban al esplendor del engreído de Boston Dynamics (BD). Sin embargo, para aquellos que nos reíamos de los bloopers en las finales del Desafío Robótico de DARPA tan cerca como en el 2015, lo que hizo Atlas fue algo casi fantástico. Entonces uno hubiese pensado que, para un salto como el que se ostentó en YouTube hace pocos días, faltaba una eternidad.
El salto mortal de un robot humanoide llegó no de un día, ni de un año para otro, sino gracias al trabajo de décadas de BD (una compañía que ha pasado por manos del MIT, Google y hoy pertenece a la japonesa Softbank) que se ha ganado un nombre por lanzar videos periódicamente de prototipos de robots de todos los tamaños y formas. Todos comparten ciertas características: son de un diseño e ingeniería exquisitos e infunden cierto temor. Lo último es un efecto colateral de la forma en que estos robots imitan los movimientos humanos y animales; algo que a su vez, los muestra ante nosotros como entes mitad biológicas y mitad máquinas. A los más conspiranoicos, claro está, les cuesta no imaginarlos en un futuro persiguiendo a sus creadores.
Para que no te lo cuenten, por suerte N+1 preparó para ti una lista (con sus respectivos videos) de los robots más fascinantes de BD.
El primero y más representativo es, por supuesto, Atlas. Fue creado el 2013 pero a inicios del 2016, hacía una de sus apariciones estelares. BD lanzaba un video mostrando cómo la última versión de Atlas, un humanoide bípedo sin cables, era capaz de desenvolverse tanto dentro como fuera de un ambiente laboral. Recogía y dejaba cargas, caminaba sobre la nieve evitando tropezarse, y cumplía sus cometidos pese a que un humano lo empujaba con un bastón de hockey de forma abusiva. La resiliencia del robot, en aquel entonces, ya era fuera de serie.
Un solo sistema maneja sus brazos, piernas y torso, permitiendo una coordinación unificada y estable. El último Atlas no mide mas de 1.75 m y pesa 82 kg. El peso, respecto a su anterior versión, bajó debido al uso de piezas impresas en 3D para crear sus piernaa, lo que combinado con sistemas hidráulicos para potenciar sus movimientos resultan en mecanismos más eficientes y potentes. Para la estabilidad en terrenos duros y la manipulación de objetos, Atlas posee sensores de visión estéreo y que le permiten no solo realizar tareas, sino también rápidamente recuperarse en caso haya algún desnivel en su andar. Esto, gracias a la constante mejora de algoritmos previamente usados en sus modelos previos. Cuenta además con un sensor lidar para explorar el terreno por sí mismo durante la ejecución de tareas simples.
Lo último, cómo olvidarlo, fue su salto mortal.
Este potente robot es un híbrido entre un Segway (transportador personal giroscópico eléctrico de dos ruedas) y el icónico Atlas. Se desplaza a 9 millas por hora en terrenos uniformes o colinas de nieve, puede cargar hasta 45 kg, y puede saltar hasta 4 pies hacia arriba. BD dice que Handle tiene tanto llantas y piernas, y “reúne lo mejor de ambos mundos”. Por su versatilidad, sería de gran utilidad en los almacenes.
¿Y si llega la revolución de los robots? Tendremos que estar más que preparados para correr: Handle puede andar hasta 24 km de una sola carga.
De SpotMini tenemos dos versiones: la del 2016, que poseía un brazo robótico largo sobre su espalda; y la del 2017, una versión a color amarillo.
La última nos hace recordar a una mascota con actitud juguetona. Además, puede andar en terrenos difíciles y agacharse bajo las mesas gracias a sus cámaras-sensores.
Ambas son versiones en miniatura de Spot, una suerte de perro robótico que al igual que sus sucesores, consistió en un sistema eléctrico con mecanismos hidráulicos. Aquí, un video de Spot (2015) interactuando con un perro real.
Uno de los robots más famosos de BD fue sin duda BigDog, un cuadrúpedo dinámico y estable creado en el 2005, con el financiamiento de la Agencia de Proyectos de Investigación de Defensa Avanzados (DARPA). Entonces, el ejército de EEUU buscaba una mula robótica que ayudaría a los soldados a cargar equipamiento y provisiones sobre terrenos difíciles para otros vehículos, incluyendo lodo y nieve. Por ello, BigDog nació con cuatro piernas en lugar de llantas.
Poseía sensores de todo tipo, incluyendo un giroscopio láser y una sistema de visión estéreo que le ayudarían a atravesar caminos difíciles y desiguales. De casi un metro de largo, 70 cm de alto, 108 kilos de peso, BigDog era capaz de cargar 154 kg a 6 km por hora en terrenos difíciles de hasta 35 grados de inclinación. Una versión mejorada de esta bestia robótica de carga incluía un brazo que podía arrojar bloques de hormigón a grandes distancias. El proyecto fue dejado de lado a fines del 2015 porque el motor de dos tiempos y un cilindro fue considerado demasiado ruidoso para los militares en situaciones de combate.
Cheetah solo busca la velocidad, en honor a su nombre (guepardo en inglés). Tiene el récord de velocidad para robots con piernas de más de 29 millas por hora, venciendo el récord de 1989 de 13.1 millas por hora establecidos en el MIT y hasta superando a Usain Bolt en los 20 metros en las Olimpiadas del 2012. El robot, en el video, corre sobre una cinta ergométrica y luce atado, pero una versión libre llamada Wildcat empezó a probarse el 2013. Aunque no fue tan rápida como Cheetah.
Y otro de los robots humanoides célebres de BD fue PETMAN, diseñado para probar un traje de protección contra ataques biológicos. En el video, del 2013, se aprecia al robot emulando una gran variedad de movimientos que podría hacer una persona dentro del traje, en un trabajo encargado por el Departamento de Defensa de EEUU. El objetivo fue hacer la prueba lo más realista posible, simulando la fisiología humana, controlando temperatura, humedad y hasta sudando. Un realismo que inquietó, a juzgar por los comentarios que recibió el video que a continuación compartimos.
Nota: BD ha creado más robots. Esta es una selección hecha por el autor del artículo.
Daniel Meza
Esta noticia ha sido publicada originalmente en N+1, ciencia que suma.

El próximo 22 de marzo, en la PUCP, se presentarán los resultados alcanzados con el desarrollo de la mano robótica para pacientes con amputación a nivel del antebrazo (transradial).
Esta mano es controlada por señales musculares (mioeléctricas) del antebrazo del paciente. Un sistema que simula artificialmente el sentido del tacto le permite “sentir” sobre el antebrazo la fuerza de contacto de los dedos de la prótesis al agarrar un objeto.
Un novedoso algoritmo de estimación de fuerza y control y la integración en una estructura antropomórfica, fácil de reproducir y con alto grado de estética, permite que la prótesis de mano sea altamente avanzada y que el paciente interactúe mejor con su entorno.
En el Perú hay falta de oferta de prótesis de miembro superior. Las más utilizadas son prótesis mecánicas, con cierta funcionalidad pero muy baja estética. Por otro lado, adquirir una prótesis mioeléctrica importada resulta muy costoso.
“La mayoría de casos de amputación se dan debido a accidentes laborales, en particular en la industria manufacturera, y los afectados no pueden adquirir estas prótesis importadas. Una prótesis mioeléctrica más accesible y estética como la propuesta permitirá al usuario recuperar la funcionalidad para realizar actividades cotidianas, reinsertarse laboralmente y desarrollar un sentido de pertenencia con su prótesis”, explica Dante Elías, coordinador general del proyecto.
Esta nueva tecnología permitirá impulsar una industria y una producción interna de este tipo de prótesis de miembro superior y también ayudará a consolidar una línea de investigación en el tema.
En el taller se hará un análisis de los impactos que representa para nuestro país esta tecnología diseñada y fabricada por el Grupo de Investigación en Robótica Aplicada y Biomecánica de la PUCP. El proyecto ha sido financiado por Cienciactiva del CONCYTEC.
La presentación se realizará en el A100 – Complejo de Innovación Académica a las 10:00 a.m.

El 13 de marzo de 1781 Herschel escribió en su cuaderno de observaciones que había observado en Géminis "una curiosa estrella difusa" que era "visiblemente más grande que el resto [de las estrellas en el mismo campo de visión]".
De hecho, este astro no podía ser una estrella pues tenía forma de "disco" y además se desplazaba respecto del fondo de estrellas fijas. Con esta forma y desplazamiento, el nuevo astro tan sólo podía ser un objeto del sistema solar: un cometa, un satélite o un planeta. Como las posiciones de los planetas, rodeados de sus satélites, eran bien conocidas, Herschel concluyó que se trataba de un nuevo cometa y así lo anunció. Pero las observaciones que siguieron mostraron que el nuevo astro no tenía los bordes difusos de los cometas, sino que su contorno era bien nítido y definido. Además, su movimiento no era el acostumbrado de las órbitas fuertemente alargadas de los cometas, sino que seguía una órbita lenta y casi circular. La lentitud de su movimiento, claramente indicaba que se trataba de un objeto más lejano del Sol que el propio Saturno.
La realidad acabó pronto por imponerse: 173 años después de las primeras observaciones que Galileo realizó con telescopio, Herschel había descubierto un nuevo planeta. Este planeta estaba situado respecto del Sol al doble de distancia que Saturno. Súbitamente, había que revisar la concepción que se había tenido hasta entonces del sistema solar. Era mucho más grande y, además, ahora nada impedía que incluso pudiese haber planetas aún más lejanos.
Herschel recibió el reconocimiento inmediato de los astrónomos profesionales y algunos de ellos sugirieron que el nuevo planeta se denominase 'Herschel', pero el descubridor sugirió bautizarlo "Georgium sidus" en honor del rey Jorge III de Inglaterra y este curioso nombre (planeta "Jorge") se utilizó hasta principios del siglo XIX. La propuesta de denominarlo Urano provino del astrónomo alemán Johann Elert Bode (1747-1826) quién argumentó que, puesto que en la mitología Urano era del padre de Saturno, se podía mantener una secuencia generacional según nos alejamos desde la Tierra: Marte es el hijo de Júpiter, Júpiter es el hijo de Saturno, y Saturno es el hijo de Urano.
En diciembre de 1781 William Herschel fue elegido miembro de la Royal Society y fue nombrado astrónomo real con un salario anual de 300 guineas. Este salario le permitió abandonar su oficio de músico para consagrarse completamente a la astronomía. Utilizando telescopios progresivamente mayores, redondeó sus descubrimientos en el sistema solar cuando en 1787 descubrió los dos satélites mayores de Urano: Titania y Oberón, y en 1789 dos nuevos satélites de Saturno: Encelado y Mimas.
Pero, de hecho, la localización de Urano no constituyó para Herschel más que el principio de una carrera llena de logros y descubrimientos. Herschel no sólo fue el mayor constructor de telescopios de la Historia, sino que además es el auténtico pionero de la astronomía estelar, del estudio de la Galaxia y de la identificación de nebulosas. Pero todos estos logros son otras historias.
Fuente: elmundo.es

Este sistema tiene como objetivo brindar control total de los riesgos en las empresa de transporte interprovincial, rural o interurbano.
El aplicativo iROADS, desarrollado por la empresa Academia Móviles, ha sido seleccionado entre 4000 prospectos startups, quedando entre los 100 mejores proyectos que participarán del evento llamado OiWeek 2018. Dicho evento se desarrollara en la ciudad de Sao Paulo, Brasil, los días 18, 19 y 20 de marzo del 2018.
Más de 2000 ejecutivos corporativos, nuevas empresas, científicos e inversores se reunirán para co-crear soluciones y habilitar oportunidades de negocios para los desafíos reales del mercado y la sociedad.
Conoce un poco más de iRoads en su página web o en su brochure de presentación.

Participa de esta iniciativa que busca reconocer a la mujer peruana en la ciencia.
Este jueves 08 de marzo se celebra el Día Internacional de la Mujer, un día que conmemora la lucha constante de la mujer por tener los mismos derechos y oportunidades que sus pares varones. Ya son 108 años que la sociedad viene reconociendo esta lucha y 43 años que esta fecha ha sido institucionalizado por la Organización de las Naciones Unidas (ONU).

En el ámbito científico, el panorama no es distinto. Existen brechas importantes entre hombres y mujeres que se dedican a la Ciencia, Tecnología e Innovación. Sólo en el Perú, según el censo 2015 de CONCYTEC, por cada investigadora hay 2.1 investigadores y por cada doctora hay 2.4 doctores. Asimismo, si profundizamos en trayectorias profesionales o en formación académica nos podemos encontrar con más indicadores que influyen en esta brecha de género: maternidad, rol de género, roles en equipos de investigación, cargos académicos, cargos administrativos, oportunidades laborales, etc.
Por eso, hoy desde Cienciactiva queremos visibilizar a aquellas mujeres peruanas que han hecho de la Ciencia, la Tecnología y la Innovación (CTI) parte de su vida llegando a niveles profesionales destacables y demostrando que pese a las dificultades ellas están demostrando ser competentes y profesionales superando la brecha existente.
Para ello, te invitamos a participar de la campaña “Mujeres Peruanas en CTI” con los siguientes pasos:
1. Identifica a una mujer peruana que se dedique a la ciencia, tecnología o innovación.
2. Descarga la plantilla que corresponde: científica, investigadora o innovadora.
3. Imprime el documento y escribe el nombre de la “Mujer en CTI” que admiras o la que consideras tu favorita.
4. Tómate una foto con el cartel y compártelo en tus redes sociales con el hashtag #MujeresEnCTI o envíanos la fotografía al correo Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo. para publicarlo en nuestras redes sociales (haremos un video compilatorio con los mensajes). Si la encuentras y la etiquetas, sería un éxito.
Juntos demostraremos que las #MujeresEnCTI están cambiando la historia de la ciencia en el país. Sigamos promoviendo los logros obtenidos por las mujeres en el desarrollo de la Ciencia, tecnología e innovación tecnológica para lograr un desarrollo igualitario entre hombres y mujeres.


Hoy 5 de marzo, en el Día Mundial de la Eficiencia Energética, es una fecha justa para reflexionar acerca del uso racional que le damos a la energía, y lo mas importante actuar en consecuencia.
La celebración en esta fecha se origina por primera vez en 1998, debido a la Primera Conferencia Internacional de Eficiencia Energética, que se desarrolló en Austria, donde más de 350 expertos y líderes de 50 países se dieron cita para tomar las medidas necesarias para afrontar la posibilidad de un agotamiento de las fuentes de energía fósiles a corto plazo.
La eficiencia energética se plantea como una de las políticas de freno para el cambio climático y para conseguir sociedades más sostenibles, junto con el desarrollo de energías renovables y una política de transporte menos agresiva con el medio. Hoy la eficiencia energética busca mejorar o mantener nuestra calidad de vida utilizando para ello menos recursos. ¿Cómo? Mejorando los procesos, utilizando productos más innovadores y menos contaminantes y, en definitiva, consumiendo de manera más inteligente.
Sin embargo, esto no implica renunciar a la calidad de vida, sino luchar por conseguir bienes y servicios energéticos usando para ello menos recursos.

El Ministerio de Ambiente informa que con pequeños cambios en hábitos y actitudes se puede garantizar la protección del ambiente y reducir el consumo, lo fundamental es ponerlos en práctica: apagar las luces al desocupar aulas, oficinas y baños, aprovechar la luz natural en la oficina y del hogar y evitar el uso innecesario de luz ornamental en exteriores y jardines, e instalar sensores de movimiento en áreas comunales, para que las luces se mantengan apagadas cuando no transiten personas, y sustituir luces incandescentes por lámparas fluorescentes o bombillas de bajo consumo.
Sin embargo, el potencial de mejora es todavía enorme. Uno de los obstáculos primordiales que seguimos afrontando es la falta de concienciación entre consumidores y administración pública, que en muchas ocasiones no perciben la eficiencia energética ni como una prioridad de primer orden, ni como una oportunidad de ahorro.
Fuente: soliclima

El 26 de febrero de 1991 será recordado como uno de los momentos más importantes de la todavía breve historia de Internet.
Ese día fue presentado oficialmente el primer navegador web y editor de HTML en modo gráfico. Su nombre, WorldWideWeb. Su creador, Tim Berners-Lee, que entre otras cosas es conocido como el padre de la web.
Se ejecutaba en una computadora NeXTcube bajo el sistema operativo NeXTSTEP y su desarrollo comenzó en octubre de 1990. El 25 de diciembre de ese mismo año se mostró una versión de pruebas, pero no fue hasta el señalado 26 de febrero de 1991 cuando se produjo su bautismo de fuego, comenzando a ser distribuido entre los compañeros de Berners-Lee en el CERN en marzo de ese mismo año. Posteriormente fue renombrado Nexus para evitar confusiones con la World Wide Web.
Fue desarrollado con el lenguaje de programación Objective-C e incluía soporte para hojas de estilo en cascada, descarga y apertura de todos los archivos soportados por NeXSTEP, navegación por grupos de noticias, protocolo FTP e incluso un corrector ortográfico.
El 30 de abril de 1993 el CERN liberó el código fuente de WorldWideWeb bajo el dominio público, convirtiéndose en software libre. Cabe señalar que a pesar del tiempo transcurrido desde que fue desarrollado, su aspecto no difiere en exceso del que tienen los navegadores actuales.
Fuente: abadiadigital.com
Foto: El NeXTcube fue usado por Tim Berners-Lee como el primer servidor web de la World Wide Web.

También destacan la amplia variedad de sus cambios de expresión, su capacidad de interactuar respondiendo preguntas y el tacto hiperrealista de su piel.
La robot Sophia, un androide que responde a preguntas con inteligencia artificial y de apariencia casi humana, ofrecerá en abril durante el Jalisco Talent Land, el mayor evento de innovación y tecnología de México, su primera conferencia en América Latina, informaron hoy los organizadores de la cita.
La participación de Sophia fue una de las principales sorpresas en el acto de presentación del evento en Ciudad de México con la presencia del gobernador de Jalisco (oeste de México), Aristóteles Sandoval.
Jalisco Talent Land se celebrará del 2 al 6 de abril próximos en el principal recinto ferial de Guadalajara, la capital de Jalisco, y ha convocado a 365.000 jóvenes talentos mexicanos que esperan disfrutar y aprender con actividades como carreras de drones o concursos como el hackaton, un encuentro de programadores cuyo objetivo es el desarrollo cooperativo de software.
En declaraciones a Efe del español Pablo Antón, creador de Talent Land, una iniciativa impulsada por el Gobierno de Jalisco, resaltó la trascendencia de la inminente presencia en Guadalajara de Sophia, “un robot” que “da sus propias conferencias con inteligencia artificial, donde la gente le puede preguntar y ella puede responder de manera libre”, explicó.
“Supimos de la inteligencia que tiene este robot, nos encantó porque cuadra mucho con nuestro evento, nos pusimos de acuerdo con su represente” y “curiosamente, cuando cerramos el trato la hicieron ciudadana de Arabia Saudita al poco tiempo, con lo cual fue un boom”, detalló.
Antón aclaró que “todavía no está cerrada su conferencia (los temas sobre los que va hablar), pero más que la conferencia en sí lo interesante es la respuesta a las preguntas” que dé al auditorio que asista al Jalisco Talent Land.
Esta robot humanoide fue creada en Hong Kong en 2015 y saltó a la fama mundial el 25 de octubre pasado cuando Arabia Saudí le concedió la nacionalidad, la primera vez en el mundo que un androide consigue un pasaporte.
Fuente: eldictamen.mx

Dos hombres, el científico serbio-americano Nikola Tesla y el físico italiano Guglielmo Marconi, se enfrentaron cara a cara en lo que se convertiría en la carrera para inventar la radio.
Hoy, más de 100 años después, seguimos sin tenerlo bien claro y todo por una pelea de patentes. La historia es turbia y combina el descubrimiento científico con demandas y marketing pasado de moda. Veamos si podemos desenredar el asunto.
Después de emigrar a los Estados Unidos, en 1884, Tesla inventó la bobina de inducción o Bobina Tesla, un dispositivo esencial para enviar y recibir ondas de radio y una Oficina de Patentes de Estados Unidos más tarde diría que Marconi se basó en su trabajo. Pero en 1895, un incendio destruyó el laboratorio de Tesla mientras se preparaba para enviar una señal de radio de aproximadamente 80 kilómetros a West Point, New York.
Mientras tanto, Marconi había estado conduciendo sus propios experimentos y en 1896, envió y recibió señales de radio basadas en el código Morse a distancias que abarcaban casi 6 kilómetros en Inglaterra. Ese mismo año, solicitó, y se le concedió, la primera patente del mundo en telegrafía inalámbrica en Inglaterra.
Tesla solicitó sus primeras patentes en el trabajo de radio en 1897 en Estados Unidos. También construyó y demostró un bote controlado por radio en el Madison Square Garden en 1898. Aquí es donde las cosas se ponen extrañas.
En 1900, la Oficina de Patentes de los Estados Unidos otorgó a Tesla las patentes 645.576 y 649.621, el diseño fundamental de las bobinas de Tesla, el 20 de marzo y el 15 de mayo, respectivamente. Las patentes de radio de Tesla lo hicieron dueño de unas de las clave para la comunicació por radio. Ese mismo año, el 10 de noviembre, Marconi presentó la patente número 7777, para telegrafía sintonizada.
Al principio, la oficina de patentes denegó las solicitudes de Marconi basándose en que su trabajo dependía del uso de bobinas de Tesla. Sin inmutarse, Marconi utilizó las conexiones y la riqueza de su padre para encabezar un negocio rentable basado en su tecnología telegráfica mientras continuaba con la lucha por la patente de radio. En 1901, transmitió el primer telégrafo transatlántico.
Marconi volvió a solicitar durante tres años, mientras que obtuvo apoyo financiero de inversores tales como Andrew Carnegie y Thomas Edison. Finalmente, en 1904, la Oficina de Patentes de Estados Unidos revertió inexplicablemente su decisión anterior y otorgó al italiano la patente de la invención de la radio.
Marconi ganó el Premio Nobel de física en 1909, alimentando aún más la rivalidad con Tesla. En 1915, Tesla demandó a la empresa Marconi por infracción de patente en vano. Marconi había ganado. ¿No?
En un giro irónico del destino, la compañía de Marconi demandó al gobierno de Estados Unidos en 1943 por infracción de patentes durante la Primera Guerra Mundial. Pero el caso nunca llegó a los tribunales. En cambio, para evitar la demanda por completo, el Tribunal Supremo de Estados Unidos confirmó la patente 645.576, restaurando así a Tesla (que había fallecido unos meses antes) como el inventor de la radio.
Entonces, ¿quién fue el verdadero inventor de la radio? Ustedes saquen sus conclusiones.
Para más información sobre patentes en el Perú: https://www.indecopi.gob.pe/patenta
Fuente: howstuffworks.com




